
Evaluate fast stereo depth and motion-safe imaging for robotics projects. Ideal for AMR, AGV, SLAM, and 3D robot guidance on practical USB3 workflows
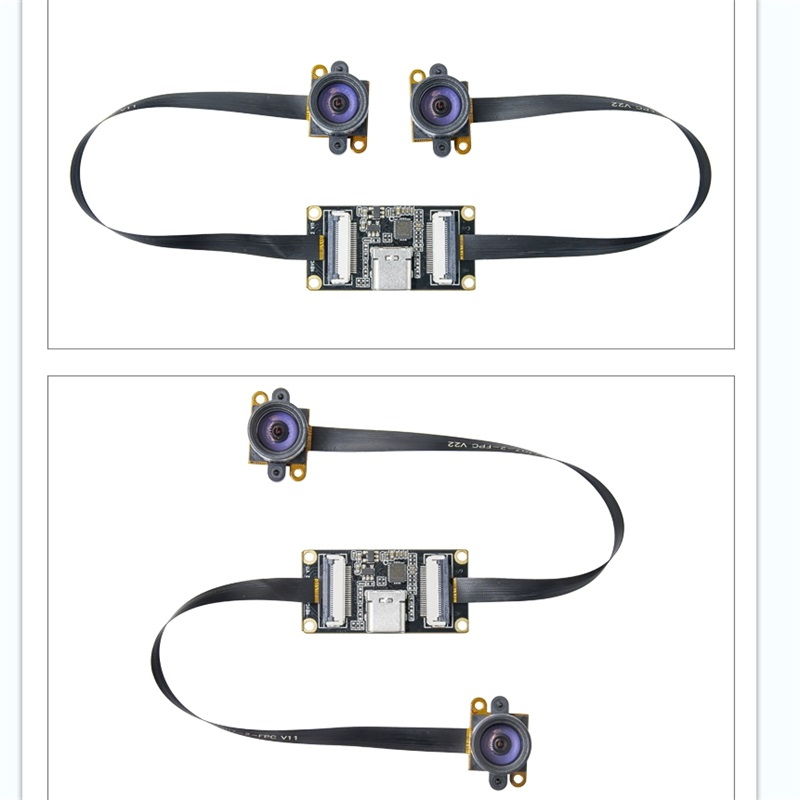
The Goobuy USB-OV9281-2 is a high-speed, dual-monochrome USB 3.0 camera module engineered specifically for 2026-era robotics and spatial computing. Featuring two OmniVision OV9281 global shutter sensors, it eliminates rolling-shutter artifacts completely. With strict hardware-level microsecond synchronization, this module delivers deterministic, uncompressed 1280×800 stereo frames at up to 120FPS. It is the definitive plug-and-play UVC solution for engineers building robust Visual SLAM (VSLAM), teleoperation data collection rigs, and Embodied AI perception stacks on NVIDIA Jetson, ROS2, and Isaac ROS platforms.
Product Overview
The Goobuy USB-OV9281-2 Stereo USB3.0 Camera is designed primarily for robotics developers and industrial automation teams that need accurate stereo depth, high-speed global shutter imaging, and reliable synchronization. Built around dual OV9281 monochrome sensors, it delivers 1280 × 800 stereo output at up to 120 FPS for AMR, AGV, mobile robot, and robot guidance applications where motion-safe imaging and real-time depth perception matter.
For U.S. and European engineering teams, this camera is best positioned as a practical stereo vision platform for SLAM, visual odometry, obstacle detection, 3D robot guidance, and robotic bin-picking development. With USB3.0 output, hardware trigger and strobe support, adjustable baseline options, and ROS / OpenCV / Jetson-friendly integration, it helps teams move faster from prototype validation to deployment-ready stereo vision.

Why Robotics and Automation Teams Choose This Camera?
This stereo global shutter camera is built for engineering teams that need practical depth perception, motion-safe imaging, and low-friction integration on modern robotics and industrial vision platforms.
✔ Stereo vision for real robot perception
Dual OV9281 sensors make the camera suitable for stereo depth, obstacle detection, robot navigation, and environment understanding in AMR, AGV, and mobile robotics workflows.
✔ Global shutter for motion-critical scenes
Global shutter capture helps avoid rolling-shutter distortion in moving robots, fast guidance tasks, and high-speed automation environments where image geometry must remain stable.
✔ 120 FPS for responsive stereo tracking
High frame rate improves the camera’s usefulness in visual odometry, dynamic robot movement feedback, high-speed guidance, and other real-time stereo perception tasks.
✔ USB3.0 output for modern development workflows
USB3.0 provides a practical path for robotics teams using ROS, ROS2, OpenCV, Jetson, Ubuntu, x86 IPCs, and other stereo vision development environments.
✔ Flexible baseline and lens options
Adjustable baseline and M12 / CS lens support make it easier to adapt the camera for short-range depth, mid-range navigation, or 3D robot guidance scenarios without redesigning the full imaging path.
✔ Designed for evaluation and deployment
This camera is not only for lab experiments. It is a practical stereo platform for teams moving from perception development to field-oriented robotics and industrial automation testing.
Key Features
Why OV9281 Monochrome Stereo Outperforms Color for AI:
Zero Interpolation Overhead: Skipping the RGB Bayer filter conversion saves critical CPU/GPU cycles on your Edge AI device (e.g., Raspberry Pi 5 or Jetson Nano).
3x Light Sensitivity: Without color filters blocking incoming light, the monochrome OV9281 captures crisp, noise-free images even in dimly lit warehouses or under microsecond strobe flashes.
Sharper Edge Detection: Computer vision algorithms (like Canny edge detection or YOLO models) thrive on high-contrast gradients, which raw monochrome provides natively.
Product Application Fields
1. Robotics Vision
Stereo vision for AMR, AGV, mobile robots, obstacle detection, robot navigation, and environment perception where synchronized depth imaging and motion stability are required.
2. 3D Robot Guidance and Industrial Automation
Stereo depth for robotic bin picking, pick-and-place, dimensioning, and machine-side automation tasks that benefit from global shutter stability and accurate scene geometry.
3. Stereo Perception Development and Research
A practical USB3.0 stereo platform for SLAM, visual odometry, ROS2 development, OpenCV pipelines, Jetson-based perception systems, and advanced robotics R&D in the U.S. and Europe.
Typical Applications
1, Embodied AI & Stereo SLAM
The Baseline for Robot Perception and VIO
In autonomous navigation and dexterous manipulation, frame drift kills depth accuracy. Unlike software-synced arrays, our dual OV9281 module features a shared clock oscillator for true hardware triggering. This ensures perfect Left/Right temporal alignment for dense 3D point cloud generation. The high-contrast monochrome global shutter freezes rapid kinematics, making it the ideal stereo input node for:
Visual-Inertial Odometry (VIO) & SLAM: AMRs, AGVs, and quadruped robots operating in dynamic, feature-sparse environments.
Embodied AI & Teleoperation: High-fidelity, zero-distortion ego-centric data collection for training Vision-Language-Action (VLA) models.
2, High-Speed AOI & Logistics Sorting
Distortion-Free Capture for Industrial Automation
When conveyor belts move at over 2 meters per second, traditional rolling shutter sensors produce "jello" effects, causing OCR and barcode read failures. The global shutter architecture of the OV9281 exposes all pixels simultaneously.
Logistics & Tracking: Achieve 99.9% read rates on smudged or rapidly moving barcodes and QR codes.
Automated Optical Inspection (AOI): Detect micro-defects on fast-moving PCBs or SMT components. The 120FPS throughput maximizes units-per-minute inspection rates without false rejections.

Problems Solved:
screenshot compressed picture when OV9281 Global shutter usb camera work in daytime, October, 2024
( the following image had been compressed much because of website design request)

FAQ1 Is this Goobuy USB-OV9281-2 stereo camera mainly for AMR and AGV navigation, or is it better for general machine vision?
This camera is best positioned first for robotics vision, especially AMR, AGV, mobile robot, SLAM, visual odometry, and obstacle-detection workflows where synchronized stereo depth and motion-safe imaging matter. It can also be used in industrial automation and machine vision, but its strongest value is in stereo perception rather than in generic 2D inspection alone.
FAQ2 Why would a robotics team choose a stereo global shutter camera instead of a standard RGB USB camera or webcam?
A standard RGB USB camera is usually fine for simple video, but it is a weak choice for stereo perception, robot navigation, and motion-sensitive robotics tasks. A stereo global shutter camera provides synchronized binocular input, more reliable depth estimation, and no rolling-shutter distortion when the robot or the scene is moving. That matters for SLAM, visual odometry, obstacle detection, and robot guidance.
FAQ3 Does the Goobuy OV9281 Stereo USB3 Camera support ROS2, Jetson, and Ubuntu-based robotics workflows?
Yes, this camera is well suited for robotics teams using ROS, ROS2, OpenCV, Jetson, Ubuntu, and other Linux-based development environments. Its value is not only in the OV9281 sensor itself, but also in the fact that it can be integrated into familiar stereo vision workflows without forcing teams into a fully custom camera stack at the beginning of a project.
FAQ4 How should we choose baseline and lens options for our robot project?
Baseline and lens choice should be driven by your actual working distance, target depth range, scene width, and whether your priority is close obstacle detection, mid-range navigation, or 3D robot guidance. A shorter baseline is generally more suitable for closer scenes, while a wider baseline can help for longer-range depth separation. Before requesting a sample, it is best to define expected working distance, field of view, and whether the camera is being used for SLAM, navigation, manipulation, or automation tasks.
FAQ5 Is 1MP enough for a serious robotics vision project in 2026?
For many robotics perception tasks, 1MP is still a practical and efficient choice when the priority is synchronized stereo depth, low latency, high frame rate, and motion-safe capture rather than high-resolution texture detail. In mobile robotics, SLAM, visual odometry, and obstacle detection, reliable stereo geometry often matters more than simply increasing pixel count. This is especially true when teams need deterministic stereo capture at 120 FPS.
FAQ6 When should we choose the Goobuy OV9281 Stereo USB3 Camera instead of an RGB-D or ToF camera?
Choose a stereo global shutter camera when your team wants more control over stereo vision development, better performance on moving platforms, or a conventional binocular vision pipeline for SLAM, visual odometry, and robot guidance. RGB-D and ToF cameras can be attractive in some indoor cases, but stereo global shutter remains a strong choice when synchronization, motion accuracy, and stable image geometry matter more than a turnkey depth appliance.
FAQ7 Can this Goobuy USB-OV9281-2 Stereo camera be used for robot guidance, bin picking, and 3D pick-and-place development?
Yes. This is one of the strongest secondary use cases after mobile robotics. The camera is a good fit for 3D robot guidance, bin picking, pick-and-place, and dimensioning tasks where depth perception and global shutter stability help improve scene interpretation. For U.S. and European automation teams, this makes it a practical bridge between robotics R&D and higher-value industrial stereo vision development.
FAQ8 What information should we send before requesting a sample of your USB3 Camera?
Before requesting a sample, it is best to send the real project context rather than only asking for a quotation. A useful stereo vision inquiry should include the robot type, host platform, operating system, target working distance, required field of view, desired baseline range, lighting condition, whether hardware trigger is needed, whether the camera is intended for SLAM, navigation, or robot guidance, and the expected annual volume. This makes it much easier to recommend the right lens, baseline, and sample configuration for your project.
FAQ9: How is the stereo synchronization achieved? Is it just software timestamping?
No. Software synchronization leads to frame drift over time. This module uses a shared hardware oscillator (hardware trigger) to fire both OV9281 sensors at the exact same microsecond. This deterministic synchronization is critical for generating reliable disparity maps and prevents fatal errors in Visual SLAM pipelines.
FAQ10: How do I handle the dual-camera stream in ROS2 or OpenCV?
The camera operates strictly via UVC plug-and-play over a single USB 3.0 cable. It presents itself to the OS as a single side-by-side video frame (e.g., 2560x800 total resolution). In OpenCV or standard usb_cam ROS nodes, you simply crop the frame exactly in half programmatically to feed your left and right stereo processing topics.
FAQ11: Can this handle 120FPS uncompressed on a Jetson Orin without latency?
Yes. Because it utilizes a 5Gbps USB 3.0 interface, you can stream the raw, uncompressed side-by-side monochrome frames (YUV/RAW format) directly into Jetson memory. This avoids the latency typically introduced by MJPEG decoding, giving your control loop the lowest possible glass-to-algorithm latency.
FAQ12: Does it support external strobe lighting for high-speed machine vision?
Yes, the module is designed with hardware strobe output pins. This allows you to synchronize high-intensity LED flashes with the exact global exposure window of the sensors, freezing ultra-fast motion (like sorting machinery) while minimizing heat and power consumption.
Case Studies & Customer Success Stories
Case Study 1 – Robotics Manufacturer in Germany
A German robotics company integrated the OV9281 stereo USB3 camera into its AMR platform. By leveraging the global shutter USB3 stereo camera 120FPS, they achieved reliable depth mapping for obstacle avoidance and navigation. The customer reported a 30% improvement in localization accuracy and reduced collision rates in busy warehouse environments.
To help us recommend the right OV9281 stereo camera setup, please send us:
• your application type (AMR, AGV, SLAM, robot guidance, bin picking, or other)
• host platform and operating system
• target working distance
• required field of view
• preferred baseline range, if known
• whether hardware trigger or strobe is required
• lighting condition
• evaluation-stage or near-production status
• expected annual volume
With this information, we can recommend a more suitable lens direction, stereo baseline, and sample configuration for your project.
 office@okgoobuy.com
office@okgoobuy.com
Follow Me
Address:A615, 6F, Huachuangda Building, No107 Xinghua 1st Road, 43 District, Xinan street, Baoan, shenzhen, China 518101